



产品分类
- 电工电子电气实训设备
- 电力电子电机实训装置
- 过程控制实验装置
- 工业机器人智能制造
- 维修电工实训设备
- PLC自动化实训设备
- 数控机床实训考核装置
- 数控机床机械加工设备
- 机床电气实训装置
- 机电一体化实训设备
- 机械示教陈列柜
- 机械专业实验设备
- 传感器检测实验室设备
- 工业互联人工智能实训设备
- 特种作业操作实训考核设备
- 物联网实验实训设备
- 消防、给排水实训设备
- 网络布线实训室设备
- 电梯安装维修实训考核设备
- 热工暖通家电制冷实训设备
- 楼宇智能化实训设备
- 环境工程实验装置
- 流体力学实验装置
- 化工专业实验实训设备
- 新能源实验实训设备
- 电力供配电实训设备
- 煤矿矿山实验实训设备
- 液压气动实验室设备
- 教学仿真软件
- 轨道交通实验实训设备
- 船舶实训考核装置
- 驾驶模拟训练设备
- 新能源汽车实训设备
- 汽车发动机底盘实训台
- 汽车电器电子实训台
- 特种车工程机械实训设备
- 智能网联汽车实训设备
- 医学教学模型
- 中小学实验室设备
- 实验箱.实验仪
- 光电子通信实验装置
- 仪器设备.教学挂图
更多新产品
- LGGY-BL07X型六轴机器人自动分拣生产线
- LGGY-BL06X型六轴机器人视觉检测生产线
- LGGY-BL05X型多模态机器人大模型与视觉协同系统
- LGGY-BL04X型七轴协作机器人实训设备
- LGGY-BL03X型六轴协作机器人实训设备
- LGGY-BL02X型桌面六轴机器人拆装套件
- LGGY-BL01X型桌面六轴机器人实训设备
- LGY-DQ08型 电气及电机控制实训考核装置
- LG-JT交通安全驾驶模拟体验设备
- 汽车燃料电池系统实训台
- LG-AI08型 人工智能综合应用技术实训考核系统
- LGN-D08型 单片机传感器综合实训平台
- LGDG-6型 电工综合实验实训工作台
- LGY-YQ09型 液压与气压传动综合实验实训工作台
- LGBX-WL01型网络综合布线实训室
更多热点产品
- 汽车透明整车模型、运输车辆模型
- CLG-104型《电机与变压器》示教陈列柜(CD解说)
- CLG-109《模具》示教陈列柜(CD解说)
- CLG-107型 机械综合陈列柜
- CLG-102型 《机械零件》示教陈列柜
- LG-DCC型 机械振打袋式除尘实验装置
- LG-MFL01型 超滤微滤膜分离实验装置
- LG-NKS型 催化剂颗粒内扩散实验装置
- LG-CLDF型 多釜串联实验装置
- LG-YY18C型 气动与PLC实训装置(T型铝槽单面)
- LG-YY18B型 透明液压传动与PLC实训装置(T型铝槽单面
- LG-YYCS01型 液压传动与控制综合测试实验台
- LG-DY01B型 电液比例综合实验台
- LG-YYZN01型 智能型液压综合实验台
- LG-DLK01型 电力系统综合自动化实验平台
LGGY-BL06X型六轴机器人视觉检测生产线
品牌:理工伟业 咨询电话:010-82827827 82827835
一、产品概述
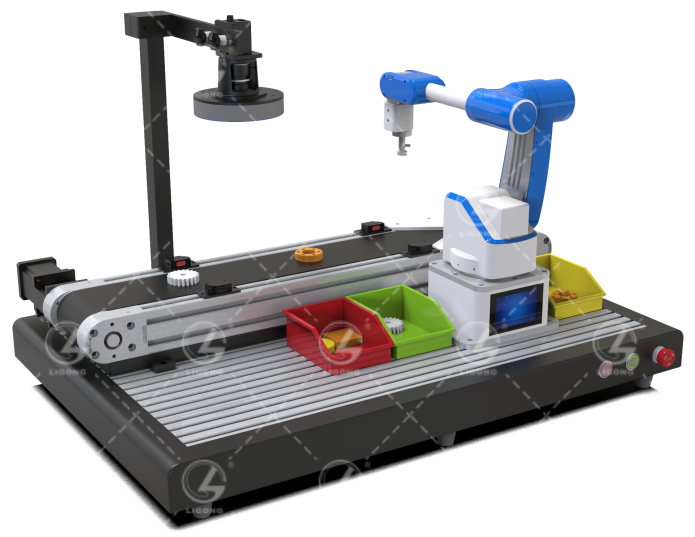
生产线以视觉系统和六轴机器人为核心,面向人工智能、机器人应用和智能制造领域中的视觉识别、定位、检测等实际应用,搭建典型的机器人+视觉生产线场景。生产线采用边缘计算终端作为处理单元,部署人工智能软件环境,不仅可以完成常规的数字图像处理、机器视觉、机器人运动控制等基础实验实训,还可以进行相对复杂的字符识别、缺陷检测、目标识别、特征分析等综合性实验。
二、产品介绍
1.满足Python程序设计、机器学习、深度学习、数字图像处理、计算机视觉、基于视觉的机器人应用、传感器控制等课程或知识点的教学;
2.生产线平台集成了机器人、视觉系统和多组传感器,采用一体化设计,整套系统可直接摆放于桌面上操作;
3.所有组件均采用镶嵌式安装,可自由选择安装位置,搭建多样化的实验实训场景;
4.采用边缘计算终端提供算力,支持PyTorch、TensorFlow等主流人工智能框架的部署;
5.融合了深度学习、机器视觉、机器人控制、视觉与机器人协同、生产线运动控制等多种技术;
6.内置的AI和视觉算法库包括物体分类识别、目标检测、缺陷检测、OCR字符识别等多种案例,满足基础应用与开发教学。
三、主要硬件参数
1.边缘计算终端
边缘计算终端采用体积小巧,外形紧凑的嵌入式计算机,预装Linux或Windows操作系统,集成Python、OpenCV等运行环境,以及产品运行所需的全部软件框架和SDK,支持数字图像处理、2D视觉、3D视觉、机器人等硬件或应用的开发和学习。
2.机器视觉系统
机器视觉系统即一套标准工业级视觉系统,包括工业相机、镜头、LED光源、光源控制器等,通过视觉支架进行集成,为所有的静态目标检测、分析和处理提供实验的硬件环境。
3.六轴机器人
该型机器人完全开放底层运动学正逆解控制算法,有助于用户学习机器人的关节控制原理。同时,提供多个拓展接口,支持视觉、语音、多种末端执行器、传送带等各类外设模块的接入,实现物体抓取、视觉协同、人机交互、自动教学演示等多种功能,可快速满足教学、科研等需求。
4.输送线
输送线上安装有步进电机、光电传感器,通过IO控制器接入边缘计算终端,实现与其他系统模块的协同。
四、实验项目
1、Python程序设计(约64课时)
(1)数字类型、转换、运算
(2)Python运算符、内置函数、序列基本用法
(3)程序选择结构实验
(4)程序循环结构实验
(5)列表实验
(6)集合实验
(7)函数实验
(8)字符串实验
(9)正则表达式实验
(10)数据可视化
(11)Python的数据处理
(12)Python文件操作
(13)Python多进程
(14)Python多线程
(15)Python进程与线程的区别
(16)Python面向对象的理解
(17)Python类的使用与类的实例化
(18)Python实例化对象的使用
(19)Python类的继承使用
(20)基于Python的串口通讯
(21)基于Python的SocketTcp通讯
(22)基于Python的SocketUdp通讯
(23)基于Python的Modbus通讯
(24)PyQt5的环境搭建
(25)PyQt5的使用
(26)Qt Designer与PyUIC的使用
2、机器学习(约24课时)
(1)基于线性回归的波士顿房价预测
(2)基于K近邻算法的电影类型识别
(3)基于K均值算法的未知数据分类
(4)基于决策树的乳腺癌诊断
(5)AdaBoost电影数据集数据分类
(6)基于EM推理的双硬币抛掷模型验证
(7)基于朴素贝叶斯的垃圾邮件过滤
(8)基于随机森林的人脸识别系统设计
(9)基于支持向量机的动态行人检测
(10)基于深度学习的车道线检测系统设计
(11)基于CNN与SVM的交通标志的识别系统设计
(12)基于HOG与SVM的交通标志识别系统设计
3、深度学习(约30课时)
(1)线性回归建模与应用——房价预测实验
(2)神经网络的模型构建与应用——服装分类实验
(3)神经网络正则化——服装分类优化实验
(4)神经网络参数优化——非线性函数极小值寻找实验
(5)基于神经网络的模型构建与测试实验
(6)基于残差网络的优化模型设计
(7)神经网络优化器——手写数字识别
(8)文本分类——京东购物分类
(9)基于LeNet手写数字体识别系统设计
(10)基于RNN歌曲自动编曲设计
(11)基于深度学习的图像数据标注
(12)基于YOLOV5的目标检测模型训练
(13)基于YOLOV5的缺陷检测案例
4、数字图像处理(约20课时)
(1)图像之间代数运算
(2)图像操作之打码与解码
(3)图像的几何仿射变换
(4)图像空域滤波
(5)图像的频域滤波
(6)基于形态学的米粒检测
(7)基于Canny算法的图像抠图
(8)基于分水岭的图像轮廓分割
(9)基于Hu矩形状匹配
5、机器视觉(约40课时)
(1)视觉系统认知
(2)像素尺寸测量
(3)物体定位和角度测量
(4)边缘长度测量与面积检测
(5)物体颜色和形状识别
(6)条码和二维码识别
(7)OCR字符分割、训练
(8)OCR字符识别
(9)基于形态学处理的产品表面缺陷检测
(10)相机棋盘格标定
(11)基于opencv的车牌识别
(12)基于模板匹配的电子产品识别
(13)基于视觉的车牌识别
(14)基于视觉的条形码识别
(15)基于视觉的二维码识别
(16)基于视觉的物体形状颜色识别
(17)基于视觉的水果识别
(18)基于图像的NanoDet目标检测模型实践
(19)基于视觉的工件缺陷检测
(20)基于视觉的证件识别
6、基于视觉的机器人应用(约20课时)
(1)机器人认知和基础操作
(2)机器人示教和运动控制
(3)机器人与视觉系统标定
(4)基于视觉的物体缺陷检测与分类
(5)基于视觉的水果种类识别与分类
(6)基于视觉的零部件尺寸测量与分类
(7)基于视觉的机器人物体码垛
五、综合实训
1.机器人的控制
机器人主要由多路电机和金属结构组成,通过对单个或多个电机进行控制,运动到指定角度,即实现机器人的控制。机器人自身可在空间中执行任意点的运动,同时,自带有吸盘,可完成对指定物体的抓取。实训中,通过对电机和吸盘的控制,可操作机器人完成各种丰富的动作;
2.AI+视觉自动仓储
采用AI技术和计算机视觉技术,控制机器人进行仓库货物的自动分拣、整理。边缘计算终端中搭载深度学习算法,视觉系统对货物进行识别和分类,机器人对货物进行多个仓位间的搬运,或者对货物进行整理归位;
3.基于AI的图象识别和抓取
基于边缘计算终端中搭载的算法模型,可进行物体识别与分类、电子产品识别、车牌识别、水果识别、OCR字符识别、产品缺陷检测等应用,并可控制机器人对不同种类的物体进行抓取和分类。