



产品分类
- 电工电子电气实训设备
- 电力电子电机实训装置
- 过程控制实验装置
- 工业机器人智能制造
- 维修电工实训设备
- PLC自动化实训设备
- 数控机床实训考核装置
- 数控机床机械加工设备
- 机床电气实训装置
- 机电一体化实训设备
- 机械示教陈列柜
- 机械专业实验设备
- 传感器检测实验室设备
- 工业互联人工智能实训设备
- 特种作业操作实训考核设备
- 物联网实验实训设备
- 消防、给排水实训设备
- 网络布线实训室设备
- 电梯安装维修实训考核设备
- 热工暖通家电制冷实训设备
- 楼宇智能化实训设备
- 环境工程实验装置
- 流体力学实验装置
- 化工专业实验实训设备
- 新能源实验实训设备
- 电力供配电实训设备
- 煤矿矿山实验实训设备
- 液压气动实验室设备
- 教学仿真软件
- 轨道交通实验实训设备
- 船舶实训考核装置
- 驾驶模拟训练设备
- 新能源汽车实训设备
- 汽车发动机底盘实训台
- 汽车电器电子实训台
- 特种车工程机械实训设备
- 智能网联汽车实训设备
- 医学教学模型
- 中小学实验室设备
- 实验箱.实验仪
- 光电子通信实验装置
- 仪器设备.教学挂图
更多新产品
- LGGY-BL03X型六轴协作机器人实训设备
- LGGY-BL02X型桌面六轴机器人拆装套件
- LGGY-BL01X型桌面六轴机器人实训设备
- LGY-DQ08型 电气及电机控制实训考核装置
- LG-JT交通安全驾驶模拟体验设备
- 汽车燃料电池系统实训台
- LG-AI08型 人工智能综合应用技术实训考核系统
- LGN-D08型 单片机传感器综合实训平台
- LGDG-6型 电工综合实验实训工作台
- LGY-YQ09型 液压与气压传动综合实验实训工作台
- LGBX-WL01型网络综合布线实训室
- LGJ-JD09型 机电一体化综合实训装置
- LGBX-AI02型人工智能应用技术实训室
- LGBX-AQ07型网络安全运维与攻防演练综合实训室
- LGBX-AQ06型网络安全攻防演练实训室
更多热点产品
- 汽车透明整车模型、运输车辆模型
- CLG-104型《电机与变压器》示教陈列柜(CD解说)
- CLG-109《模具》示教陈列柜(CD解说)
- CLG-107型 机械综合陈列柜
- CLG-102型 《机械零件》示教陈列柜
- LG-DCC型 机械振打袋式除尘实验装置
- LG-MFL01型 超滤微滤膜分离实验装置
- LG-NKS型 催化剂颗粒内扩散实验装置
- LG-CLDF型 多釜串联实验装置
- LG-YY18C型 气动与PLC实训装置(T型铝槽单面)
- LG-YY18B型 透明液压传动与PLC实训装置(T型铝槽单面
- LG-YYCS01型 液压传动与控制综合测试实验台
- LG-DY01B型 电液比例综合实验台
- LG-YYZN01型 智能型液压综合实验台
- LG-DLK01型 电力系统综合自动化实验平台
LGGY-BL02X型桌面六轴机器人拆装套件
品牌:理工伟业 咨询电话:010-82827827 82827835
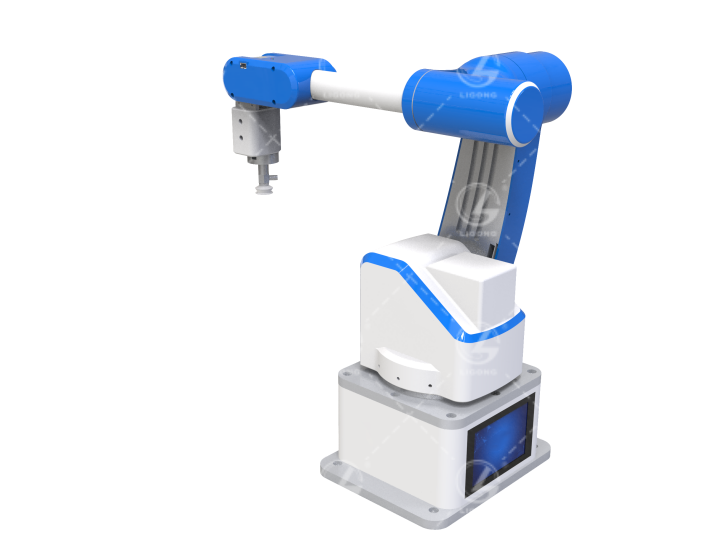
一、产品概述
六轴机器人在结构原理上,涵盖了机械设计、电机控制、电路设计与通讯等多个学科。在组装一台完整的工业级六轴机器人的过程中,学生需要考虑到每一个细节,从底座固定、关节连接,到电缆布线、电控系统安装等,这些精细化的操作不仅要求学生能把控安装和测试的全过程,还能够有效的加深其对机械结构、电路连接、运动控制等知识的理解,进而培养其良好的实践意识和解决问题的能力。
二、产品特点
1、机械结构与机械设计
多轴运动学原理:了解机器人的六个自由度和不同关节轴的运动特点,掌握各关节之间的关系及其如何实现复杂的空间定位。传动机构原理:学习机器人中的传动结构(如减速器、齿轮和驱动轴),了解如何通过传动结构实现精确运动控制。关节设计与结构分析:熟悉各关节的设计原理,了解基本动作的实现方式,掌握各关节在负载和灵活性方面的优化。机器人末端执行器的选用与更换:学习如何选择适当的末端执行器(如夹具、吸盘等)以适应不同任务需求,以及末端执行器的安装和调整方法。
2、电机控制与电气系统
步进电机控制:了解步进电机的特点及其在机器人中的应用,学习如何通过控制电机的转速和位置来实现精准的关节控制。电气接线与布线技巧:掌握机器人内部复杂电缆的布线方法,学习如何设计和整理布线,以防止线缆拉扯、干扰或磨损。电气连接与电源管理:学习电气元件连接的基本方法,包括电机、电路板、传感器等的接线规范,了解如何分配电源以确保系统稳定运行。
3、控制系统与传感器应用
控制系统架构:了解机器人的控制系统构成,包括主控板、电机驱动器、控制算法和电机控制信号的传输。反馈与闭环控制:通过位置传感器(编码器)获取关节位置反馈,掌握如何通过闭环控制实现对关节精确的实时控制。
4、编程与算法实现
运动控制编程:学习控制机器人运动的基本指令,通过程序实现复杂的运动路径、速度调整和末端精确定位。多轴协调与同步控制:编程实现六个关节的协调控制,使机器人在不同关节同时运动时保持流畅无误差。自动化任务编程:将一系列运动指令编程化,以完成自动化组装或搬运等任务,练习自动化任务的设计和实现。
5、系统调试与故障排查
机械与电气故障排查:学习调试机器人的方法,包括对各关节、电机、传感器、电路连接等可能出现的故障进行诊断和排查。调试与校准技术:了解机器人各关节零位和运动范围的调试方法,通过手动和程序化的方式进行初始校准,确保每个关节的精度和稳定性。
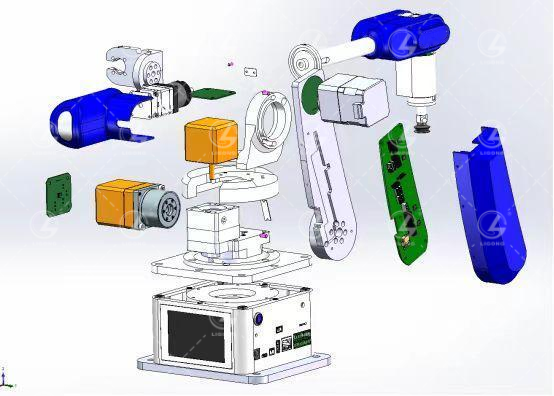
三、产品结构组成
1、结构件
整机结构件包含基座、支撑杆、固定板等多个种类,统一采用高强度铝制材料,为机器人的高性能工作状态提供强有力的质量支撑。
2、电机组件
包含各轴电机及传动装置,具备低噪音、高效能的特点,使得机器人末端最大负载能力达1kg以上。
3、电路控制板
作为机器人的“大脑”,电路控制板负责接收指令、处理数据、控制电机等关键任务。控制板集成了先进的控制算法和多个外部接口,能够实现对机器人运动的精确控制和拓展应用。
4、电气组件
除了以上结构件和组件外,机器人集成了一键开关、气泵等电气组件,实现机器人在多场景下进行复杂作业的需求。
5、外观结构
采用3D打印的高韧性树脂材料,其轻便、耐用的特性符合机器人对轻量化和耐用性的要求。
四、产品组装步骤
1、准备阶段
(1)确保所有结构件和组件齐全,检查无损坏或缺失。
(2)准备好扳手、十字螺丝刀、六角扳手、扭力扳手、防静电手环、清洁布等工具。
(3)阅读组装指南,熟悉各部件名称与功能。
2、机器人组装步骤
第1步:组装机器人底座
第2步:安装第1轴电机与支撑底座
第3步:安装第2轴关节及电机
第4步:安装第3轴关节及电机
第5步:安装第4轴关节及电机
第6步:安装5轴和6轴组件
第7步:组装气泵模块
第8步:组装底板模块
第9步:安装三四轴侧板
第10步:安装五、六轴尾板
3、机器人上电与零位校准
机器人组装完毕后,接通电源,在底座的触摸屏中打开如下关节校准界面,按照步骤对第1轴~第6轴进行校准。
4、安装机器人外壳
至此,机器人全部组装完毕,可以开展其他应用和开发工作。