



- 电工电子电气实训设备
- 电力电子电机实训装置
- 过程控制实验装置
- 工业机器人智能制造
- 维修电工实训设备
- PLC自动化实训设备
- 数控机床实训考核装置
- 数控机床机械加工设备
- 机床电气实训装置
- 机电一体化实训设备
- 机械示教陈列柜
- 机械专业实验设备
- 传感器检测实验室设备
- 工业互联人工智能实训设备
- 特种作业操作实训考核设备
- 物联网实验实训设备
- 消防、给排水实训设备
- 网络布线实训室设备
- 电梯安装维修实训考核设备
- 热工暖通家电制冷实训设备
- 楼宇智能化实训设备
- 环境工程实验装置
- 流体力学实验装置
- 化工专业实验实训设备
- 新能源实验实训设备
- 电力供配电实训设备
- 煤矿矿山实验实训设备
- 液压气动实验室设备
- 教学仿真软件
- 轨道交通实验实训设备
- 船舶实训考核装置
- 驾驶模拟训练设备
- 新能源汽车实训设备
- 汽车发动机底盘实训台
- 汽车电器电子实训台
- 特种车工程机械实训设备
- 智能网联汽车实训设备
- 医学教学模型
- 中小学实验室设备
- 实验箱.实验仪
- 光电子通信实验装置
- 仪器设备.教学挂图
- LGBX-AI02型人工智能应用技术实训室
- LGBX-AQ07型网络安全运维与攻防演练综合实训室
- LGBX-AQ06型网络安全攻防演练实训室
- LGBX-X02型网络信息安全运维实训室
- LGBX-SJ03型数据中心网络工程综合实训室
- LGBX-WL06型网络系统管理与运维实训室
- LGBX-WL01型网络综合布线实训室
- LGBX-DN01型计算机组装与维修实训室
- LGWL-CK01型智能仓储应用实训系统
- LGHG-YR02型液-液热交换综合实验装置
- LGHG-YB03C型化工仪表维修工实训考核装置
- LGWK-DH06型电工电子技术实验平台
- LGLY-ZN03型智能楼宇实训室
- LGJD-Y05C型通用机电设备安装与调试实训装备
- LGZN-SZ02L型智能制造数字孪生虚拟仿真实训室
- 汽车透明整车模型、运输车辆模型
- CLG-104型《电机与变压器》示教陈列柜(CD解说)
- CLG-109《模具》示教陈列柜(CD解说)
- CLG-107型 机械综合陈列柜
- CLG-102型 《机械零件》示教陈列柜
- LG-DCC型 机械振打袋式除尘实验装置
- LG-MFL01型 超滤微滤膜分离实验装置
- LG-NKS型 催化剂颗粒内扩散实验装置
- LG-CLDF型 多釜串联实验装置
- LG-YY18C型 气动与PLC实训装置(T型铝槽单面)
- LG-YY18B型 透明液压传动与PLC实训装置(T型铝槽单面
- LG-YYCS01型 液压传动与控制综合测试实验台
- LG-DY01B型 电液比例综合实验台
- LG-YYZN01型 智能型液压综合实验台
- LG-DLK01型 电力系统综合自动化实验平台
LGGY-DS13型具身复合机器人创新设计套装实训装置(增强版)
品牌:理工伟业 咨询电话:010-82827827 82827835
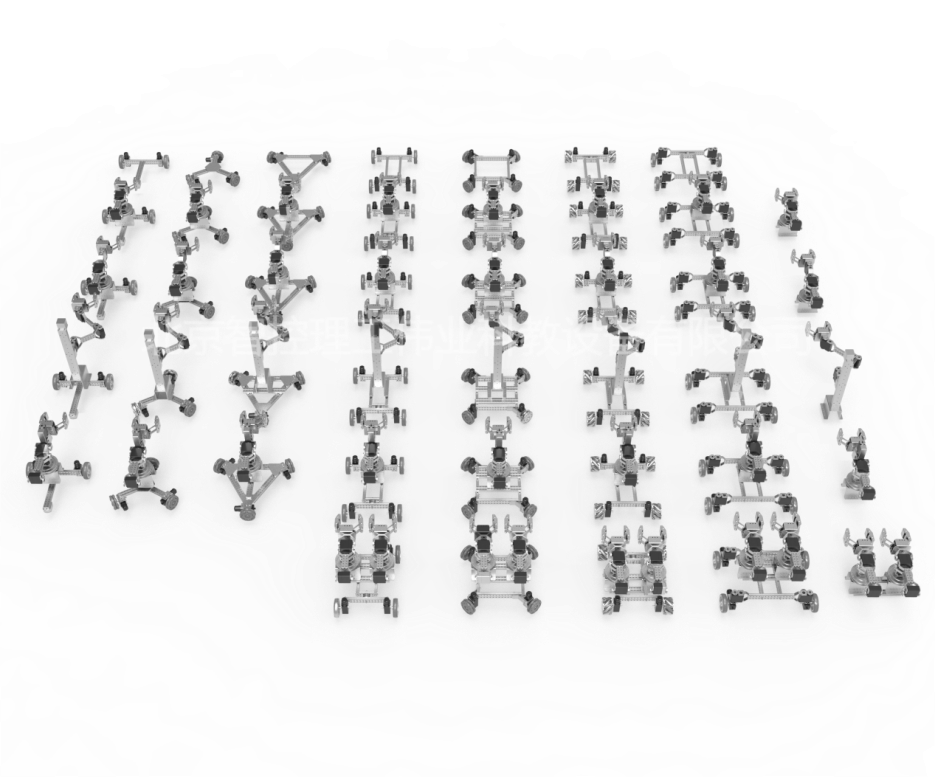
※1.机器人构型:可以完成不少于8种典型底盘、6种典型机械臂、不少于45种典型具身复合机器人。
1.1典型具身底盘 8种:后双驱四轮差速底盘、双驱六轮差速底盘、三轮福来轮底盘、四驱四轮差速底盘、四轮福来轮全向底盘、四轮麦轮全向底盘、四驱福麦全向底盘、四驱独立转向底盘。
1.2 典型具身机械臂6种:串联3自由度机械臂、串联四自由度机械臂、串联五自由度机械臂、串联六轴机械臂、Scara机械臂、双臂。
1.3 典型具身复合机器人48种:双驱四轮差速云台复合机器人、双驱四轮差速四轴复合机器人、双驱四轮差速五轴复合机器人、双驱四轮差速六轴复合机器人、双驱四轮差速Scara复合机器人、双驱四轮差速双臂复合机器人、双驱四轮差速双臂升降复合机器人、双驱六轮差速云台复合机器人、双驱六轮差速四轴复合机器人、双驱六轮差速五轴复合机器人、双驱六轮差速六轴复合机器人、双驱六轮差速Scara复合机器人、双驱六轮差速双臂复合机器人、双驱六轮差速双臂升降复合机器人、三轮全向云台复合机器人、三轮全向四轴复合机器人、三轮全向五轴复合机器人、三轮全向六轴复合机器人、三轮全向Scara复合机器人、三轮全向双臂复合机器人、三轮全向双臂升降复合机器人、四驱差速云台复合机器人、四驱差速四轴复合机器人、四驱差速五轴复合机器人、四驱差速六轴复合机器人、四驱差速Scara复合机器人、四驱差速双臂复合机器人、四驱差速双臂升降复合机器人、2种四轮全向云台复合机器人、2种四轮全向四轴复合机器人、2种四轮全向五轴复合机器人、2种四轮全向六轴复合机器人、2种四轮全向Scara复合机器人、2种四轮全向双臂复合机器人、四轮转向云台复合机器人、四轮转向四轴复合机器人、四轮转向Scara复合机器人。
2.机器人零件:包含金属结构件、机器人执行部件、五金零件。金属结构件主要材质为航空铝,表面氧化处理,共不少于100件,包含双排孔梁型杆150、双排孔梁型杆90、双排孔梁型杆50、直流电机模组、摆动模组、夹持器模组、直线运动模组、转台模组、角度折弯件等。五金零件为钢制螺丝、螺母、组装工具等。
3.机器人电机:不少于共2种10个,包含编码直流电机*4、标准舵机*7;
3.1编码直流电机: 霍尔编码器,减速比30,空载转速360rpm,供电电压12V,额定扭矩输出1Nm,堵转扭矩4.5Nm;
3.2标准舵机:额定扭矩30kgf.cm;
4.机器人控制器:单片机主板2个,AI嵌入式开发板1个,驱动扩展板2个。
4.1单片机主板:包含STM32和Arduino两种主板。STM32芯片为stm32f407,32 位微控制器,基于 ARM Cortex-M4 架构,时钟速度可达 150MHz,具有 512KB 的闪存和 192KB 的 SRAM。Arduino采用32 位 ARM Cortex-M3 处理器,最高时钟频率为76 MHz。
4.2 AI嵌入式开发板:搭载 Sunrise 5 智能计算芯片,可提供不少于9 Tops 的算力, 支持 Transformer、RWKV、Occupancy、Stereo Perception 等多种复杂模型和新兴算法,预装Ubuntu系统和ROS系统。
※4.3驱动扩展板:可驱动4路直流电机、6路PWM舵机、4路双模拟IO传感器;
4.4软件:适配Keil5、Arduino IDE、Vscode等常用的IDE环境。需提供在Vscode下基于Arduino框架不少于15个实验项目的STM32机器人控制实例。提供Ubuntu和ROS系统镜像文件。
※5.机器人传感器
超声波传感器不少于*3、四路巡线模块*1、集成视觉摄像头*1、陀螺仪*1、离线语音模块*1、激光雷达*1,无畸变200w像素高清摄像头*·。
6.机器人交互模块
彩色LE D灯*1、喇叭模块*1、USB手柄遥控器*1。
7.实验项目及资源
※7.1实验项目:主要由具身机器人构型创新设计、感知系统创新设计、场景应用设计三个部分组成。构型创新设计需满足上述8种典型底盘、6种典型机械臂、45种典型具身复合机器人构型的组装和设计说明、驱动控制。感知系统创新设计包含机器人避让、循迹、姿态控制、语音指令控制、视觉循迹、视觉追踪、人脸检测;YOLO工程化部署、机械臂视觉搬运、移动机器人导航与定位(Gampping、Hector、Cartographer)等功能。场景应用设计包含倒车入库、道路无人驾驶、野外无人勘探、电力巡检等场景。
※7.2资源:提供配套实验项目的实验教程、所有构型的三维设计图文件、所有程序的源码。
《机械原理》、《传感器检测与控制》、《单片机原理及应用》、《机器视觉》、《自动控制原理》、《机器人学》、《机器人操作系统ROS》、《移动机器人导航与定位》等课程开展综合实践。
竞赛支持:中国高校智能机器人创意大赛、中国大学生工程实践与创新能力大赛、中国机器人及人工智能大赛等竞赛训练。