



产品分类
- 电工电子电气实训设备
- 电力电子电机实训装置
- 过程控制实验装置
- 工业机器人智能制造
- 维修电工实训设备
- PLC自动化实训设备
- 数控机床实训考核装置
- 数控机床机械加工设备
- 机床电气实训装置
- 机电一体化实训设备
- 机械示教陈列柜
- 机械专业实验设备
- 传感器检测实验室设备
- 工业互联人工智能实训设备
- 特种作业操作实训考核设备
- 物联网实验实训设备
- 消防、给排水实训设备
- 网络布线实训室设备
- 电梯安装维修实训考核设备
- 热工暖通家电制冷实训设备
- 楼宇智能化实训设备
- 环境工程实验装置
- 流体力学实验装置
- 化工专业实验实训设备
- 新能源实验实训设备
- 电力供配电实训设备
- 煤矿矿山实验实训设备
- 液压气动实验室设备
- 教学仿真软件
- 轨道交通实验实训设备
- 船舶实训考核装置
- 驾驶模拟训练设备
- 新能源汽车实训设备
- 汽车发动机底盘实训台
- 汽车电器电子实训台
- 特种车工程机械实训设备
- 智能网联汽车实训设备
- 医学教学模型
- 中小学实验室设备
- 实验箱.实验仪
- 光电子通信实验装置
- 仪器设备.教学挂图
更多新产品
- LGGY-BL20X型桌面式智能制造生产线
- LGGY-BL19X型多功能智能建造机器人系统
- LGGY-BL18X型视觉感知与工业机器人实训平台
- LGGY-BL17X型3D工业视觉检测实训平台
- LGGY-BL16X型复合C型移动协作机器人实训设备
- LGGY-BL15X型复合B型移动协作机器人实训设备
- LGGY-BL14X型复合A型移动协作机器人实训设备
- LGGY-BL13X型AI智能交互机器人实训设备
- LGGY-BL12X型基于视觉的移动抓取机器人
- LGGY-BL11X型移动机器人应用开发平台
- LGGY-BL10X型机器人大模型与视觉自动分拣生产线
- LGGY-BL09X型机器人大模型与视觉检测生产线
- LGGY-BL08X型机器人大模型与视觉协同控制平台
- LGGY-BL07X型六轴机器人自动分拣生产线
- LGGY-BL06X型六轴机器人视觉检测生产线
更多热点产品
- 汽车透明整车模型、运输车辆模型
- CLG-104型《电机与变压器》示教陈列柜(CD解说)
- CLG-109《模具》示教陈列柜(CD解说)
- CLG-107型 机械综合陈列柜
- CLG-102型 《机械零件》示教陈列柜
- LG-DCC型 机械振打袋式除尘实验装置
- LG-MFL01型 超滤微滤膜分离实验装置
- LG-NKS型 催化剂颗粒内扩散实验装置
- LG-CLDF型 多釜串联实验装置
- LG-YY18C型 气动与PLC实训装置(T型铝槽单面)
- LG-YY18B型 透明液压传动与PLC实训装置(T型铝槽单面
- LG-YYCS01型 液压传动与控制综合测试实验台
- LG-DY01B型 电液比例综合实验台
- LG-YYZN01型 智能型液压综合实验台
- LG-DLK01型 电力系统综合自动化实验平台
LGGY-BL19X型多功能智能建造机器人系统
品牌:理工伟业 咨询电话:010-82827827 82827835
一、产品概述
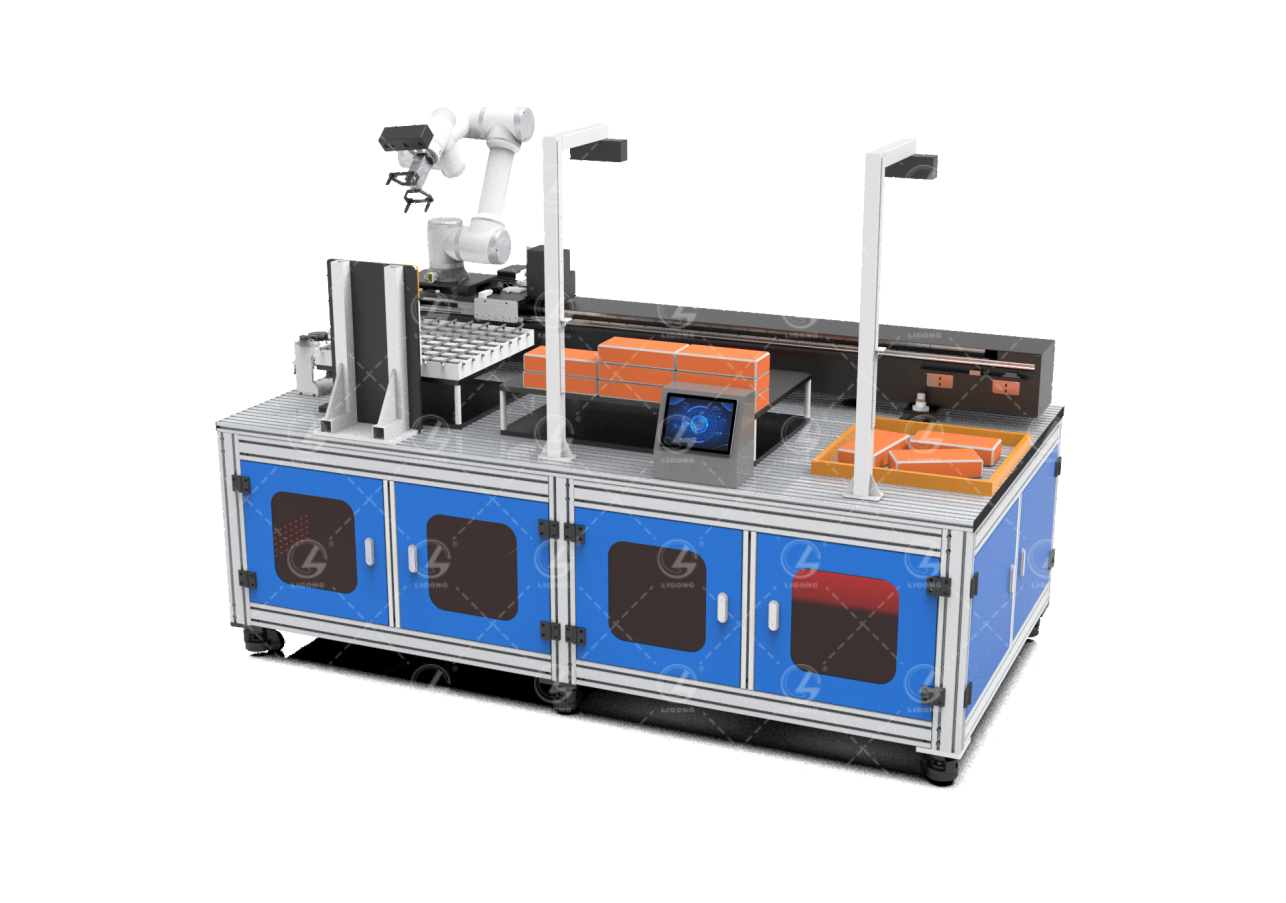
多功能建造机器人工作站采用1台六轴协作机械臂、2套3D视觉系统、1套深度视觉系统、1套移动导轨平台。在工作台上方设置三个作业区域,分别为建筑材料堆放区域、砌筑区域、拓展区域(铺砖、钢筋绑扎等)。其中,3D视觉系统分别安装在建筑材料堆放区域和砌筑区域,通过三维点云分析,判断建筑材料的堆料和作业状况,实现对机械臂的抓取引导。深度视觉系统安装在机械臂末端,为机械臂作业提供实时的环境感知能力。
在技术实现上,比如当控制机械臂对物料进行抓取时,3D视觉系统能为机械臂提供需要抓取的位置和角度信息,进而完成相应的抓取任务;当控制机械臂进行作业时,深度视觉系统能实时监测工作区域的建筑材料施工角度、位置,确保机械臂按照既定的作业任务实现自动工作。
二、产品功能
1.砌筑机器人
将六轴协作机械臂末端工具更换为抓取砖块的专用夹爪,通过3D相机、深度相机对建筑材料堆放区域和砌筑区域进行高精度扫描,引导机械臂根据系统设定的砖块位置、砌筑高度等作业参数进行精准作业。
2.铺贴机器人
将六轴协作机械臂的末端工具更换为吸取瓷砖的专用吸盘,通过3D相机、深度相机对建筑材料堆放区域和作业场景进行高精度扫描,引导机械臂根据系统设定的缝隙大小、对齐情况等作业参数进行精准作业。
3.钢筋网绑扎机器人
将六轴协作机械臂的末端工具更换为自动绑扎工具,通过深度视觉系统对作业场景进行高精度扫描,引导机械臂根据扫描的图像信息逐一完成绑扎作业任务。
三、关键技术
1.机器人在建筑领域的应用
六轴协作机械臂通过灵活地安装吸盘、夹爪等多种精密工具,实现了从基础施工到精细作业的全链条覆盖。比如吸盘的应用,允许机器人在垂直或水平的表面上稳定作业,如墙砖/地砖铺设、高楼幕墙安装等;夹爪能够精准抓取并搬运砖石、预制构件等,在特殊场景下,可选装定制结构的夹爪进行施工,减少了人力需求及搬运过程中的损耗。
2.建筑材料的三维形态分析与抓取
多功能智能建造机器人系统使用了高清2D相机、3D相机等设备,构建出建筑材料及其周围环境的精确三维模型。系统能够自动识别实训台上复杂环境中的各种建筑材料,包括建筑材料的形状、尺寸、位置,为后续机械臂的抓取提供精确指导,确保机械臂在复杂环境中也能实现稳定、精准的抓取任务。
3.建造机器人系统协同控制
多功能智能建造机器人系统基于先进的网络通信能力和实时的数据共享能力,确保机械臂与系统之间能够即时交换状态信息、任务指令及环境感知数据。系统根据设定的作业要求与相机感知到的现场情况,自动向机械臂分配任务、规划路径、协调动作,实现机械臂自主完成砌筑、铺砖、钢筋网绑扎等多项作业功能。
四、主要硬件参数
1.六轴协作机械臂
采用节卡品牌的C5协作机械臂,其末端负载为5kg,臂展954mmn,满足项目作业要求。
2.3D视觉系统
采用知象科技的Surface HD系列3D相机,该相机可满足从60mm到2600mm测量距离下的多种工作任务。在60mm到150mm的工作距离,Surface HD的最高精度可达0.02mm,适用于精度要求高的芯片、微小元器件的扫描与检测作业。在150mm到1200mm的工作距离,Surface HD可以高效完成相应的物流分拣、检测、上下料、工件找正、组装等任务。在1200mm到2600mm的工作距离,将Surface HD应用于对大中型物体的识别、检测,还可完成路径规划、分拣、码垛等任务。
3.深度视觉系统
深度视觉系统采用1台200万像素深度体感摄像头,安装于机械臂末端,用于目标的精确定位与机械臂引导。摄像头可兼容ubuntu,linux和树莓派等操作系统,兼容USB3.0接口协议,可进行深度信息感知、活体识别等。摄像头内置立体深度算法,可实现更准确的深度感知及更远的范围。通过校准,立体深度感知的误差率低至2%,在室内和室外环境中最远可捕获相距达10米的数据。可进行AI视频图像分析,拍摄人脸、车辆、仪表设备等视频图像,综合分析研判,确保场所安全。
4.水平移动滑轨
选用水平方向的移动滑台,搭配光电传感器,通过IO控制器接入边缘计算终端,实现与其他系统模块的协同。
5.运算单元
采用工业级结构,体积小巧,外形紧凑,安装windows10系统,集成C++、OpenCV等运行环境,支持数字图像处理、3D视觉、机器人等硬件或应用的开发和学习。