



- 电工电子电气实训设备
- 电力电子电机实训装置
- 过程控制实验装置
- 工业机器人智能制造
- 维修电工实训设备
- PLC自动化实训设备
- 数控机床实训考核装置
- 数控机床机械加工设备
- 机床电气实训装置
- 机电一体化实训设备
- 机械示教陈列柜
- 机械专业实验设备
- 传感器检测实验室设备
- 工业互联人工智能实训设备
- 特种作业操作实训考核设备
- 物联网实验实训设备
- 消防、给排水实训设备
- 网络布线实训室设备
- 电梯安装维修实训考核设备
- 热工暖通家电制冷实训设备
- 楼宇智能化实训设备
- 环境工程实验装置
- 流体力学实验装置
- 化工专业实验实训设备
- 新能源实验实训设备
- 电力供配电实训设备
- 煤矿矿山实验实训设备
- 液压气动实验室设备
- 教学仿真软件
- 轨道交通实验实训设备
- 船舶实训考核装置
- 驾驶模拟训练设备
- 新能源汽车实训设备
- 汽车发动机底盘实训台
- 汽车电器电子实训台
- 特种车工程机械实训设备
- 智能网联汽车实训设备
- 医学教学模型
- 中小学实验室设备
- 实验箱.实验仪
- 光电子通信实验装置
- 仪器设备.教学挂图
- LG-DLK02A型 多功能继电保护及变电站综合自动化实
- LG-HO2型 面向鸿蒙的智能网联实验系统
- LG-G06型 数字化工厂综合应用实训系统
- LG-GA02型 工业机器人模块化实训平台
- LGDS-03型 智能制造设备技术应用平台
- LG-DQYL01型 电气回路故障排查与诊断装置
- LG-X101C型 1+X考证工业机器人操作与运维工作站
- LG-RCZ01A型 工业机器装调与运维员培训考核系统
- LGJT-DC01型 手持式多功能交通调查仪
- LGJT-LD01型 便携式激光雷达全息路口感知系统
- LGJT-HL01型 基于移动互联的交通信息检测系统
- LGJT-SJ01型 智慧交通大数据实验平台
- LGWL-HMC01A型 智能网联座舱实训台(鸿蒙系统)
- LG-LDG02型 锂电池隔膜电压击穿测试仪(50点)
- LG-ZN011型 智能应急疏散培训教学设备
- LG-DLK01型 电力系统综合自动化实验平台
- LG系列 智能建筑实验实训装置
- LGJS-3型 模块式柔性环形自动生产线及工业机器人
- LGJX-82E型 立体仓库实训装置
- LGJS-1型 现代物流仓储自动化实验系统
- LGJS-2型 模块式柔性自动环形生产线实验系统(工
- LG-2400型 数控模组化生产流水线综合系统(CD制程
- LGJD-01型 光机电一体化控制实训装置
- LGJD-02型 光机电一体化控制实训装置
- LG-235A 光机电一体化高速分拣实训系统
- LGK-III型 数控车/铣床综合考核装置(二合一/生产型
- LG-AT2型 自控原理与计算机控制实验仪
- LG-NLY01型 楼宇智能化工程实训系统
- LGZK-201G 自动化综合实训装置( PLC、直流调速、触
- LGPD-205B型 PLC、单片机及微机原理综合实训装置
LG-HO2型 面向鸿蒙的智能网联实验系统
品牌:理工伟业 咨询电话:010-82827827 82827835
一、产品简介
面向鸿蒙的智能网联实验系统(型号:SeaIOT-B-HMICV-01),是针对鸿蒙操作系统在智能网联车机体验方面应用而设计的一个典型实验系统。
产品聚焦鸿蒙南向设备开发与北向应用开发的全体系架构,包含网联车载环境感知技术、卫星定位技术、4G/5G无线通信技术、CAN总线通信技术、人机交互技术、信息交互技术等,采用十余种体验型车载传感器、鸿蒙设备开发模块、开源鸿蒙中控网关,通过网络通信,实现毫米波雷达测距、超声波测距、陀螺仪姿态检测、车载设备控制、RFID刷卡解锁、车辆行驶方式控制、卫星定位、车载网关可视化人机交互、4G车载数据上云等功能。提供详细的实验案例,帮助学生掌握鸿蒙设备开发、应用开发、以及传感器应用、嵌入式接口开发、CAN总线通信等方法。产品外观如图所示。

产品外观参考图(以参数和实物为准)
二、产品特点
鸿蒙体系全面。覆盖LiteOS内核、OpenHarmony南向设备开发、应用开发,以及基于OpenHarmony开源操作系统北向应用开发。
行业特色突出。鲜明的智能网联汽车技术特色,包含体验型车载传感器、CAN总线组网、中控车机系统、信息交互软件。
网络通信多样。集成CAN总线技术、以太网通信技术、WiFi通信技术、4G LTE/5G移动通信技术、GPS/BEIDOU定位技术。
模块灵活可扩展。支持32位Cortex-M3处理器和Hi3861处理器两种硬件平台,可以替换插入不同的传感器模块,板载显示屏,实时显示当前信息。Cortex-M3硬件平台预留无线通信模块接口,支持HI3861 WiFi等模块的应用扩展,支持通信模块固件与处理器固件切换烧录;预留RS485、CAN端子排,能够与外部通信设备交互;
车载信息上云。集成4G LTE移动通信模块,可通过上位机配置接入自研云服务平台,支持TCP、MQTT等通信协议。支持5G通信扩展应用。
三、硬件组成
实验箱包括八个以上车载感知模块,1个鸿蒙中控,1个触摸显示屏。
车载感知模块包括毫米波雷达、超声波雷达、陀螺仪模块、4G LTE通讯定位模块、RFID控制模块、电机调速模块、环境调节模块、光照度调节模块。其中环境调节模块、光照度调节模块采用海思hi3861 SOC芯片作主控,板载OLED显示屏,支持传感器模块插装连接。其他模块采用M3芯片作主控,支持HI3861模块作WiFi联网通讯。
鸿蒙中控,采用四核64位Cortex-A55处理器,主频最高2.0GHz,为后端数据处理提供高效稳定的性能,集成双核心GPU,VPU及NPU,GPU支持OpenGL ES3.2/2.0/1.1;VPU可实现4K 60FPS H.265/H.264/VP9视频解码和1080p 100fps HH.265/H.264/VP9视频解码;NPU支持Caffe/Tensorflow主流架构模型。运行OpenHarmony3.1 release及以上操作系统。
触摸显示屏:屏幕显示,支持触摸。
硬件模块会根据客户的需求有所调整,下图为参考布局。

四、软件功能
1.鸿蒙南向设备开发
鸿蒙南向设备采用C语言编程,支持OpenHarmony系统的内核基础开发、驱动开发、网络通信及综合应用开发,可对模块温湿度、可燃气体、光照度进行采集,对通风扇、LED、beep、继电器等执行器进行控制,可以多传感器或执行器结合,实现环境监测、安防报警、智能调节的功能。
2.数据接入云平台
鸿蒙南向设备可通过MQTT通讯接入第三方,如华为IOTDA平台,进行远程采集、控制、设置策略。
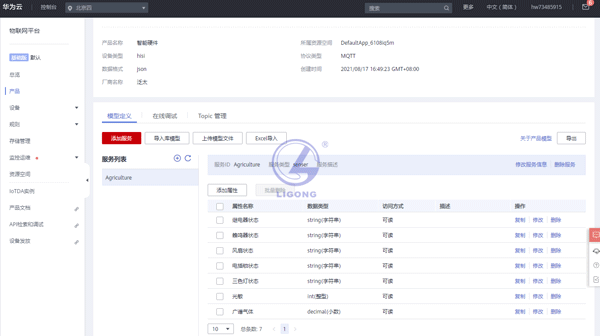
接入华为IOTDA平台
3.鸿蒙移动端北向应用开发
提供鸿蒙移动端应用软件,可实现IOTDA平台登录、项目创建、应用关联、传感器数据获取、执行器控制的功能。移动端支持Java、ArkTS、JS语言编程,基于华为物联网平台API接口,通过HTTP协议获取接入设备列表、传感器信息,通过MQTT协议与终端模块即时交互。

4.开源鸿蒙系统应用开发
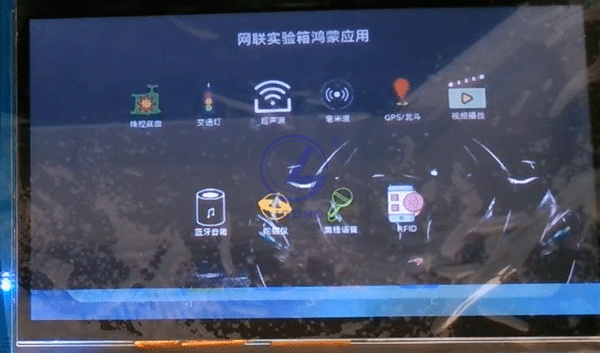
网联实验箱网关系统软件,采用开源Openharmony系统,ETS、或ArkTS语言编程技术设计人机交互界面,使用网络通信技术与终端模块信息交互,读取模块状态,发送模块指令、可视化显示。可以使用软件查看每个传感器的功能、操作软件体验每个传感器的性能,如浏览传感器的采样数据、发送命令控制诸如调速电机模拟线控等执行器操作。具有系统参数配置,如服务器开启关闭、网络参数配置、云服务参数配置等。具有原始收发数据显示功能和数据解析显示功能,对比通信协议,更易于理解系统逻辑。
具有毫米波雷达测距、超声波测距、陀螺仪姿态检测、RFID刷卡解锁、车辆行驶方式控制、卫星定位、车载网关展示、4G车载数据上云功能。
典型软件界面,如图所示。
五、课程资源
主要课程资源如下:
|
序号 |
类别 |
子类 |
实验名称 |
课时 |
|
1. |
智能网联环境感知技术基础
|
嵌入式应用开发技术
|
实验系统整体介绍 |
1 |
|
2. |
毫米波雷达参数采集 |
2 |
||
|
3. |
陀螺仪姿态数据采集 |
2 |
||
|
4. |
超声波距离数据采集 |
2 |
||
|
5. |
GPS经纬度数据采集 |
2 |
||
|
6. |
调速电机模拟线控 |
2 |
||
|
7. |
RFID刷卡控制 |
2 |
||
|
8. |
4G LTE数据传输 |
2 |
||
|
9. |
基于Hi3861的OpenHarmonyOS内核基础开发
|
1)OpenHarmony内核实验
|
(1)OpenHarmony开发环境搭建; |
2 |
|
10. |
(2)OpenHarmony_helloworld实验; |
1 |
||
|
11. |
(3)OpenHarmony_LED灯点亮实验; |
1 |
||
|
12. |
(4)OpenHarmony_任务消息交替打印实验; |
1 |
||
|
13. |
(5)OpenHarmony_定时器开发实验; |
1 |
||
|
14. |
(6)OpenHarmony_信号量开发实验; |
1 |
||
|
15. |
(7)OpenHarmony_事件开发实验; |
1 |
||
|
16. |
(8)OpenHarmony_互斥锁开发实验; |
1 |
||
|
17. |
(9)OpenHarmony_消息队列开发实验; |
1 |
||
|
18. |
2)OpenHarmony驱动开发实验
|
(1)OpenHarmony驱动开发_RGB灯驱动实验 |
2 |
|
|
19. |
(2)OpenHarmony驱动开发_按键控制蜂鸣器实验 |
2 |
||
|
20. |
(3)OpenHarmony驱动开发_呼吸灯控制实验 |
2 |
||
|
21. |
(4)OpenHarmony驱动开发_ADC读取电压实验 |
2 |
||
|
22. |
(5)OpenHarmony驱动开发_串口收发实验 |
2 |
||
|
23. |
(6)OpenHarmony驱动开发_LCD显示实验 |
2 |
||
|
24. |
3)OpenHarmony网络通信实验
|
OpenHarmony子系统_WiFi创建热点实验 |
2 |
|
|
25. |
OpenHarmony子系统_WiFi STA联网实验 |
|
||
|
26. |
OpenHarmony子系统_UDP客户端通信实验 |
2 |
||
|
27. |
OpenHarmony子系统_tcp服务端通信实验 |
|
||
|
28. |
OpenHarmony子系统_MQTT消息订阅发布实验 |
2 |
||
|
29.
|
基于Hi3861的OpenHarmony南向设备开发
|
1)OpenHarmony物联网综合应用实训
|
OpenHarmony华为IOTDA平台接入实验 |
2 |
|
智能小夜灯实验 |
2 |
|||
|
智能家居温湿度监测实验 |
2 |
|||
|
智能家居通风控制实验 |
2 |
|||
|
智能家居照明控制实验 |
2 |
|||
|
|
基于OpenHarmony北向应用开发实验
|
|
1)DevEco开发环境搭建实验 |
2 |
|
|
2)基于OpenHarmony的毫米波雷达测距应用实验; |
2 |
||
|
|
3)基于OpenHarmony的超声波雷达测距应用实验; |
2 |
||
|
|
4)基于OpenHarmony的陀螺仪姿态监测应用实验 |
2 |
||
|
|
5)基于OpenHarmony的RFID身份识别控制应用实验; |
2 |
||
|
|
总课时 |
|
|
≥48 |
六、产品清单
|
序号 |
类别 |
名称 |
数量 |
备注 |
|
1 |
结构 |
可移动式铝质箱体 |
1 |
|
|
2 |
|
实验箱大底板 |
1 |
含电源插口、音量调节旋钮、自锁开关、RJ45口等 |
|
3 |
|
交换机 |
1 |
八口,安装在大底板背面 |
|
4 |
|
WiFi路由器 |
1 |
三口,安装在大底板背面 |
|
5 |
|
USB-HUB |
1 |
安装在大底板背面 |
|
6 |
|
步进电机 |
1 |
安装在大底板,含转盘 |
|
7 |
中控 |
鸿蒙系统主控网关 |
1 |
|
|
8 |
|
显示屏 |
1 |
|
|
9 |
|
扬声器 |
1 |
|
|
10 |
|
声音调节旋钮 |
1 |
|
|
11 |
环境感知模块 |
调速电机模块 |
1 |
模拟线控 |
|
12 |
|
RFID控制模块 |
1 |
|
|
13 |
|
超声波测距模块 |
1 |
|
|
14 |
|
毫米波雷达模块 |
1 |
|
|
15 |
|
陀螺仪模块 |
1 |
|
|
16 |
|
4G LTE通讯定位模块 |
1 |
|
|
17 |
|
环境监测模块 |
1 |
|
|
18 |
|
光线联动模块 |
1 |
|
|
19 |
|
CAN总线主控模块(带OLED屏) |
6 |
|
|
20 |
|
Hi3861主控模块 |
2 |
|
|
21 |
附件 |
附件盒 |
1 |
|
|
22 |
|
DC12V3A电源适配器 |
1 |
|
|
23 |
|
USB 3.0数据线 |
1 |
网关烧写镜像 |
|
24 |
|
Mini USB数据线 |
1 |
网关串口调试 |
|
25 |
|
Type-C USB数据线 |
1 |
2个Hi3861模块使用 |
|
26 |
|
直连网线 |
1 |
|
|
27 |
|
RFID标签 |
2 |
NFC,13.56MHz |
|
28 |
|
USB转串口头 |
1 |
|
|
29 |
|
交叉串口线 |
1 |
|
|
30 |
|
方口USB数据线 |
1 |
M3嵌入式主控使用 |
|
31 |
|
J-Link仿真器(含20P排线) |
1 |
M3嵌入式主控使用 |
|
32 |
|
程序下载调试板(含10P排线) |
1 |
M3嵌入式主控使用 |
|
33 |
|
USB鼠标键盘 |
1 |
|
|
34 |
|
合格证 |
1 |
|
|
35 |
|
设备清单 |
1 |
|
|
|
共用设备 |
定位增强器 |
1 |
多个设备共用 |
七、产品参数
|
序号 |
货物 名称 |
技术规格参数 |
|
1. |
智能网联实验平台结构 |
尺寸522mm×339mm,工作电压:DC12V±5%;工作电流:2A。箱体内部采用整块底板作为支撑和CAN总线走线,功能模块通过接插件与底板连接。 内置路由模块,底板具有以太网接口,支持外部设备通过网络通信方式访问实验箱功能模块。 |
|
2. |
|
包含环境监测模块、光线联动模块等轻量型HarmonyOS开发模块和OpenHarmony开源操作系统标准型开发板两种不同形式的鸿蒙系统。HarmonyOS开发模块侧重于C语言调用HarmonyOS API接口实现南向设备驱动;而OpenHarmony侧重于DEVECO下的北向应用程序开发。 |
|
3. |
|
终端模块包含毫米波雷达、超声波雷达、电机测速、陀螺仪姿态监测、LTE通讯定位、RFID电机控制共六个模块,通过mini pci-e插槽与底板连接,环境监测模块、光线联动模块共两个模块通过香蕉插孔与底板连接。 |
|
4. |
|
实验箱上可以操作和验证毫米波雷达、超声波传感器两种测距传感器基本工作原理对比,陀螺仪姿态监测工作原理,RFID识别控制原理,基于Ubuntu的鸿蒙操作系统设备开发。支持轻量型harmony OS开发和标准型openharmony应用系统开发。 |
|
5. |
OpenHarmony中控网关 |
采用标准开源鸿蒙操作系统,通过网络通信与鸿蒙终端及网联模块通信获取数据,并可视化展示。 主控芯片采用四核64位Cortex-A55处理器,主频最高2.0GHz,内存2G,存储容量16GB;集成双核心GPU,VPU及NPU,GPU支持OpenGL ES3.2/2.0/1.1,VPU可实现4K 60FPS H.265/H.264/VP9视频解码和1080p 100fps HH.265/H.264/VP9视频解码,NPU支持Tensorflow主流架构模型; 板载1个USB2.0 Host接口,2个USB3.0 Otg接口,1个Mini USB接口,2个以太网接口,1个耳机接口,1个TF卡接口,1个HDMI接口;板载WiFi、蓝牙集成通信模块。 默认运行OpenHarmony3.1及以上系统,可通过系统设置查看版本号。供电电压:DC12V5A; |
|
6. |
|
具有基于开源鸿蒙操作系统的网联环境感知GUI应用程序的功能,包括:系统启动显示OpenHarmony图标,通过设置查看到OpenHarmony3.1以上操作系统版本号;运行网联环境感知GUI应用程序,实现毫米波测距测速、超声波测距、陀螺仪姿态角度、车机娱乐视频播放的功能。 |
|
7. |
|
显示屏尺寸10.0英寸, 通过HDMI线缆与鸿蒙中控网关的HDMI接口相连,显示鸿蒙操作系统的主界面。 |
|
8. |
毫米波雷达模块 |
尺寸:100mm*60mm,通过mini pci-e接插件与底板连接,既支持组合后整体使用也支持插拔后独立使用;同时具有RS485、CAN总线接口,可外接设备扩展使用。 板载CAN收发器,通过CAN总线及网络模块与中控网关通信。 采用性能Cortex-M3处理器驱动毫米波雷达,获取雷达传感器数据实时显示在0.96英寸OLED屏上,并通过CAN总线与中控网关通信;中控网关可通过网络通信实时读取距离、速度数据,支持报警阈值设置,距离低于阈值,触发板载蜂鸣器自动蜂鸣; 探测范围在10cm~350cm之间,探测角度水平36°,垂直120°,供电电压DC5V; |
|
9. |
|
能够获取雷达传感器前方障碍物的距离、靠近速度,提供雷达仿真系统应用软件相关软件著作权登记证书复印件。 |
|
10. |
|
具有雷达定位信息重放与重点区域放大功能,包括:能导入已加密的雷达定位数据,利用算法进行分析处理;可在上位机虚拟仿真界面上显示移动目标,实现目标位置的重放;并通过设置开始量程、角度参数、放大倍数对移动目标重点区域进行放大显示。 |
|
11. |
超声波雷达模块 |
尺寸:100mm*60mm,通过mini pci-e接插件与底板连接,既支持组合后整体使用也支持插拔后独立使用;同时具有RS485、CAN总线接口,可外接设备扩展使用。 采用性能Cortex-M3处理器驱动超声波测距模块,获取超声波传感器前方障碍物的距离数据,实时显示在0.96英寸OLED屏上,并通过CAN总线与中控网关通信; 中控网关可通过网络通信实时读取距离数据,支持报警阈值设置,距离低于阈值,触发板载蜂鸣器自动蜂鸣; 板载CAN收发器连接到CAN总线;支持板载测距信息显示,CAN总线联机交互传输测距信息两种方式; 可通过CAN总线发送测距信息,接收命令设置距离报警阈值,并在低于阈值时触发蜂鸣器自动报警; 探测范围在2~400cm之间,探测角度±15°,供电电压DC5V; |
|
12. |
|
能够获取超声波传感器前方障碍物的距离数据,提供定位跟踪管理平台相关的软件著作权登记证书复印件 |
|
13. |
电机测速模块 |
尺寸:100mm*60mm,通过mini pci-e接插件与底板连接,既支持组合后整体使用也支持插拔后独立使用;同时具有RS485、CAN总线接口,可外接设备扩展使用。 原理:模拟车辆底盘线控。 具有D/R/N三个挡位切换功能、启动/刹车功能、速度检测功能。 采用性能Cortex-M3以上处理器作为主控,检测按键按下切换不同功能,切换空挡、前进、倒车三个档位,控制减速直流电机正转、反转、停止模拟车辆的行驶状态,通过0.96英寸OLED显示屏模拟车辆状态实时显示。 板载CAN收发器,具有CAN总线通信功能,可通过网络模块与中控网关通讯,支持远程车辆操控。 板载RS485总线接口,支持应用扩展。 供电电压:DC5V。 |
|
14. |
陀螺仪姿态监测模块 |
尺寸:100mm*60mm;通过mini pci-e接插件与底板连接,既支持组合后整体使用也支持插拔后独立使用;同时具有RS485、CAN总线接口,可外接设备扩展使用。 板载CAN收发器,通过CAN总线、网络模块与中控网关通信。可通过CAN总线命令切换姿态数据接入中控网关。 采用性能Cortex-M3处理器驱动陀螺仪模块,获取当前的俯仰角、横滚角、偏航角等角度信息,在0.96英寸OLED屏上实时显示,并通过CAN总线、网络模块与中控网关通信, 板载RS485总线接口、三端电源接口、蜂鸣器、调试接口等; |
|
15. |
|
中控网关能够通过网络通信获取姿态信息,实时显示俯仰角、横滚角、偏航角的姿态 |
|
16. |
RFID电机控制模块 |
尺寸:100mm*60mm,通过mini pci-e接插件与底板连接,既支持组合后整体使用也支持插拔后独立使用;同时具有RS485、CAN总线接口,可外接设备扩展使用。 采用性能Cortex-M3处理器驱动RFID模块,实时读取RFID电子标签,与车载中控模拟系统配合录入卡号,驱动板载蜂鸣器蜂鸣、电机转动; 支持NFC标签、Mifare卡、cpu卡多种类型;具有CAN总线通信功能,可通过CAN总线读取RFID信息、驱动执行器; 板载RS485总线接口,0.96英寸OLED显示屏实时显示当前状态; |
|
17. |
|
提供通用修阻机参数处理系统相关软件著作权登记证书复印件。 |
|
18. |
4G LTE通讯定位模块 |
采用性能Cortex-M3以上处理器驱动该模块,支持GPS/BEIDOU多种定位方式,能够获取当前的经纬度数据、授时等,实时显示在OLED屏上; 支持GPRS、4G Lte多制式移动通信,板载SIM卡插槽,插入SIM卡可实现运营商网络的接入功能。兼容TCP、MQTT多种通信协议,支持数据上云。;板载SIM卡接口,通过网络连接与中控网关通信,支持联网参数配置,可实现车载毫米波数据、超声波数据、模拟线控底盘状态(含挡位、速度)等上传到云服务平台; 具有RS485总线接口,支持应用扩展; 供电电压:DC5V; 采用性能Cortex-M3处理器驱动GPS模块,支持4G lte移动通信,获取当前的经纬度、授时等数据,在0.96英寸OLED显示屏上实时显示,并支持插入SIM卡实现移动通信;板载RS485总线接口、三端电源接口、蜂鸣器、调试接口等; |
|
19. |
环境监测模块 |
板载温湿度、直流风扇、火焰传感器、蜂鸣器。可以直接连接Hi3861主控模块。 |
|
20. |
光线联动模块 |
板载光强、光敏、继电器、红蓝色LED。可以直接连接Hi3861主控模块。 |
|
21. |
Hi3861主控模块 |
基于海思Hi3861高度集成的2.4GHz WLAN SoC芯片,内置32位高性能位处理器,最高运行频率160Mhz,内置352KB SRAM,288KB ROM,2MB Flash存储空间; 集成802.11b/g/n基带和RF电路,具有WiFi IoT联网功能,支持IPv4、IPv6、DNS、DHCPv4/DHCPv6、MQTT、CoAP、HTTP、JSON; 支持Lite OS、HarmonyOS系统和第三方组件, 内置 PA 和 LNA,集成 TX/RX Switch、Balun 等; 支持 STA 和 AP 形态,作为 AP 时最大支持 6 个 STA 接入; 支持 WFA WPA/WPA2 personal、WPS2.0; 支持 RF 自校准方案。 板载LCD彩色显示屏,具有电池供电接口,支持电池供电和箱体大底板供电。 供电电压:DC5V。 |
|
22. |
教学 资源 |
1.网联汽车传感执行技术 1)毫米波雷达数据采集 2)超声波测距数据采集 3)陀螺仪角度数据采集 4)GPS定位数据采集 5)调速电机模拟线控 6)RFID车门刷卡解锁 |
|
23. |
|
2.基于Hi3861的HarmonyOS应用开发
(1)HarmonyOS开发环境搭建; (2)HarmonyOS_helloworld实验; (3)HarmonyOS_LED灯点亮实验; (4)HarmonyOS_任务消息交替打印实验; (5)HarmonyOS_定时器开发实验; (6)HarmonyOS_信号量开发实验; (7)HarmonyOS_事件开发实验; (8)HarmonyOS_互斥锁开发实验; (9)HarmonyOS_消息队列开发实验; 2)HarmonyOS驱动开发实验 (1)HarmonyOS驱动开发_RGB灯驱动控制实验 (2)HarmonyOS驱动开发_按键控制蜂鸣器实验 (3)HarmonyOS驱动开发_呼吸灯控制实验 (4)HarmonyOS驱动开发_ADC读取电压实验 (5)HarmonyOS驱动开发_串口收发实验 (6)HarmonyOS驱动开发_LCD显示实验 3)HarmonyOS网络通信实验 (7)HarmonyOS子系统_WiFi创建热点实验 (8)HarmonyOS子系统_WiFi STA联网实验 (9)HarmonyOS子系统_UDP客户端通信实验 (10)HarmonyOS子系统_tcp服务端通信实验 (11)HarmonyOS子系统_MQTT消息订阅发布实验 4)HarmonyOS终端综合应用实验 (12)HarmonyOS华为IOTDA平台接入实验 (13)智能小夜灯实验 (14)智能家居温湿度监测实验 (15)智能家居通风控制实验 (16)智能家居照明控制实验 1)基于HarmonyOS移动端应用开发实验 提供自研的华为IOTDA平台鸿蒙移动端应用程序,支持新建产品、注册设备、搭建应用,远程采集监控等功能。 (1)HarmonyOS Java及JS布局开发实验、 (2)HarmonyOS Ability搭建页面框架实验、 (3)HarmonyOS UI组件构建交互界面实验、 (4)HarmonyOS 数据库存取应用 (5)HarmonyOS多线程与并发 (6)网络HTTP通信及JSON解析 (7)多媒体图像加载与视频播放 |
|
24. |
|
基于主控的OpenHarmony网联模块应用开发实验 (1)DevEco开发环境搭建实验 (2)基于OpenHarmony的毫米波雷达测距应用实验; (3)基于OpenHarmony的超声波雷达测距应用实验; (4)基于OpenHarmony的陀螺仪姿态监测应用实验 (5)基于OpenHarmony的RFID身份识别控制应用实验; (6)基于OpenHarmony的无线照明监测及灯光控制实验; (7)基于OpenHarmony的无线温湿度监测及通风控制实验 |
|
|
|
提供OpenHarmony操作系统下的网联环境感知GUI应用程序,提供毫米波测距测速、超声波测距、陀螺仪姿态角度、车机娱乐视频播放等实验案例。 |